SN74HC595 芯片
大约 4 分钟
74HC595是一个8位串行输入、平行输出的位移缓存器:平行输出为三态输出。在SCK的上升沿,单行数据由SDL输人到内部的8位位移缓存器,并由Q7‘输出,而平行输出则是在LCK的上升沿将在8位位移缓存器的数据存人到8位平行输出缓存器。当串行数据输人端OE的控制信号为低使能时,平行输出端的输出值等于平行输出缓存器所存储的值。而当OE为高电位,也就是输出关闭时,平行输出端会维持在高阻抗状态。
引脚图
{kind=link}
功能
| 符号 | 引脚 | 描述 |
|---|---|---|
| Q0 - Q7 | 第 15 脚,第 1 - 7 脚 | 8位并行数据输出 |
| GND | 第 8 脚 | 接地 |
| Q7' | 第 9 脚 | 串行数据输入 |
| MR | 第 10 脚 | 主复位(低电平) |
| SH_CP | 第 11 脚 | 数据输入时钟线 |
| ST_CP | 第 12 脚 | 输出存储器锁存时钟线 |
| OE | 第 13 脚 | 输出有效(低电平) |
| DS | 第 14 脚 | 串行数据输入 |
| VCC | 第 16 脚 | 电源 |
工作原理
数据端
Q0-Q7:八位并行输出端,可以直接控制数码管的8个段。
Q7':级联输出端。我将它接下一个595的SI端。
DS:串行数据输入端。
控制端
MR(10脚):低电平时将移位寄存器的数据清零。通常我将它接Vcc。
SH_CP(11脚):上升沿时数据寄存器的数据移位。QA--》QB--》QC--》。。。--》QH;下降沿移位寄存器数据不变。(脉冲宽度:5V时,大于几十纳秒就行了。我通常都选微秒级)。
控制移位寄存器
SH_CP 上升沿数据移位 SH_CP 下降沿数据保持。
ST_CP(12脚):上升沿时移位寄存器的数据进入存储寄存器,下降沿时存储寄存器数据不变。通常我将 ST_CP 置为低电平,当移位结束后,在 ST_CP 端产生一个正脉冲(5V时,大于几十纳秒就行了。我通常都选微秒级),更新显示数据。
控制存储寄存器
ST_CP 上升沿移位寄存器的数据进入存储寄存器 ST_CP 下降沿存储寄存器数据不变。
OE(13脚):高电平时禁止输出(高阻态)。如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。比通过数据端移位控制要省时省力。
注:
- 74HC164 和 74HC595 功能相仿,都是 8 位串行输入转并行输出移位寄存器。741HC64 的驱动电流(25mA)比 74HC595(35mA)的要小,14 脚封装,体积也小一些。
- 74HC595 的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。这在串行速度慢的场合很有用处,数码管没有闪烁感。
- 与 74HC164 只有数据清零端相比,74HC595 还多有输出端时能/禁止控制端 OE,可以使输出为高阻态。所以是用这块芯片会更方便。
- 74HC595 是具有 8 位移位寄存器和一个存储器,三态输出功能。移位寄存器和存储器是分别的时钟。数据在 SH_CP(见时序图)的上升沿输入,在 ST_CP(见时序图)的上升沿进入的存储寄存器中去。如果两个时钟连在一起,则移位。
- 寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(DS),和一个串行输出(Q7’),和一个异步的低电平复位,存储寄存器有一个并行 8 位的,具备三态的总线输出,当使能 OE 时(为低电平),存储寄存器的数据输出到总线。
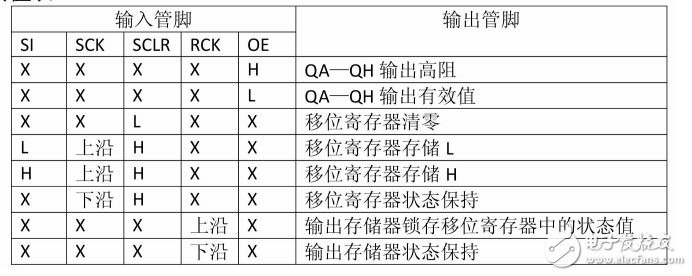
真值表
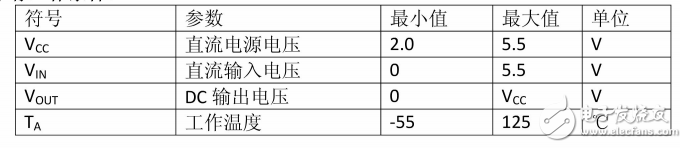
最高电压和最低电压
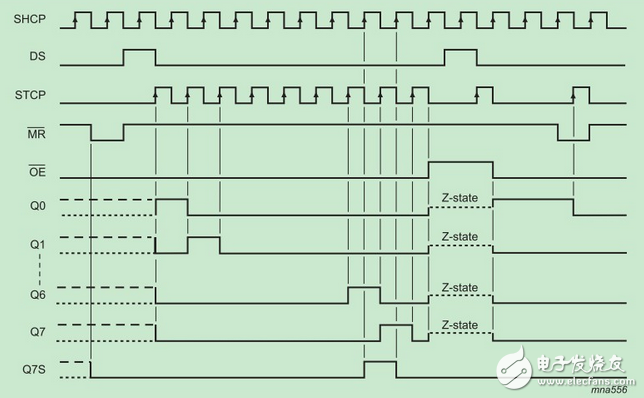
时序图
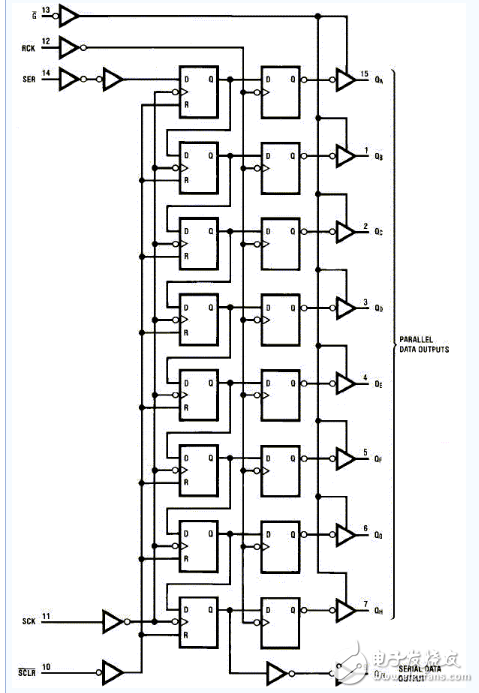
逻辑图
使用 esp32 驱动
将音频接收模块接收到的数字信号输入到 74HC595 进行输出控制 LED
#include <Arduino.h>
// 定义SN74HC595连接引脚
const int dataPin = 12; // DS
const int clockPin = 13; // SH_CP
const int latchPin = 14; // ST_CP
// 定义音频接收模块的模拟输入引脚
const int audioInputPin = 34;
void setup() {
// 初始化引脚模式
pinMode(dataPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(latchPin, OUTPUT);
// 初始化串口监视器
Serial.begin(9600);
// // 初始化输出
// digitalWrite(latchPin, LOW);
// shiftOut(dataPin, clockPin, MSBFIRST, 0b01000000);
// digitalWrite(latchPin, HIGH);
}
void loop() {
// 读取音频信号的模拟值
int analogValue = analogRead(audioInputPin);
// 将模拟值映射到 8 位信号(0 - 255)
byte signalValue = map(analogValue, 1, 4095, 0, 255);
// 输出映射后的值到串口监视器(用于调试)
Serial.println(signalValue);
// 设置锁存引脚为低电平
digitalWrite(latchPin, LOW);
// 使用shiftOut函数发送数据
shiftOut(dataPin, clockPin, MSBFIRST, signalValue);
// 设置锁存引脚为高电平
digitalWrite(latchPin, HIGH);
// 等待一段时间
delay(10); // 10毫秒
}